Christopher Katins
Christopher Katins
Home
Projekte
Publikationen
Fotografie
Deutsch
English
Thesis
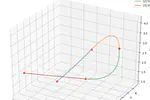
MAVeric
MAVeric erstellt ideale dreidimensionale Trajektorien, die ruckfrei von Quadcoptern abgeflogen werden können. Neben der GUI-Version mit Simulation ist auch eine CLI-Variante vorhanden.
Zitieren
×