MAVeric
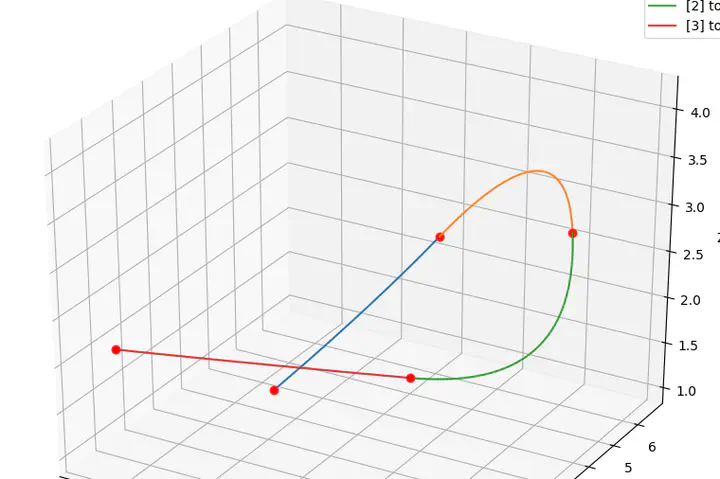
MAVeric is a simulation for quadrotors (and in particular “micro air vehicles” = MAVs) that incorporates a GUI to show all current state variables and control the MAV via the default PD controller. Furthermore, minimum snap trajectories can be generated, visualized and directly followed by the MAV through the GUI.
More information can be found on the Github page.